Real-time Lab Administration Guide
The Real-time Lab is used by students taking courses in CS 452/652 where students design and implement a real-time multi-tasking operating system using the tools and techniques of real-time programming for embedded systems. Implementation uses cross-compilation for an ARM-based system-on-chip. The operating system then supports an application program involving process control, data acquisition, and communication. This page serves as an administration guide for CSCF staff supporting the course (although others may find it useful). Note: This page is currently under construction. Information may be missing, or may require clarification.Glossary
Physical Lab Space
The Real-time Lab is located in MC3018 and is restricted to students enrolled in CS 452/652. The lab is locked at all times with a keyfob scanner on the door for staff access, and a mechanical keypad on the door for student access. The code for the keypad changes every term after Assignment 0 (A0) and is given out during the lecture. Students are not to share the code with anyone else.Outer Room
The outer room for MC3018 features a standard linux nettop lab for software development. There are also PCs present with Raspberry Pi controllers connected. The purpose of these PCs is to allow students to test and debug their code without taking up an entire train track. (Note: Add the exact amount of nettop and debugging stations) --Inner Room (MC3018a)
The inner room for MC3018 features two train tracks with associated Raspberry Pi controllers and PCs. There are two empty tables for future expansion (for a total of four potential train tracks). The inner room is generally noisier due to the nature of the trains. The doors leading to the room can be closed if noise becomes an issue.Hardware
(Note: A diagram of our standard hardware setup would be useful here) --Raspberry Pis
The Raspberry Pi is used by students to run and test their code. The Raspberry Pi loads the student's code over TFTP and communicates with the track controller and console PC via RS-232. The Raspberry Pi 4 with a BCM2711 processor is currently used in the lab. Any RAM option should work, although 4GB models are generally preferred (if available) in case a full OS is required for testing. Older model Raspberry Pis will not work due to their limited UARTs.Bring-up
A brand new Raspberry Pi cannot boot over TFTP without changing the EEPROM settings. This is done by temporarily booting the Raspberry Pi from an SD card with Raspbian and runningsudo rpi-eeprom-config --edit. The EEPROM settings should be configured to the following:
[all] BOOT_UART=1 BOOT_ORDER=0xf241 TFTP_PREFIX=2 USB_MSD_DISCOVER_TIMEOUT=5000Reasoning:
-
BOOT_UART=1will enable bootloader output over UART0. -
BOOT_ORDER=0xf241will set the default boot order to the following (read from right to left):- SD card (0x1)
- USB (0x4)
- Network/TFTP (0x2)
- Reboot (0xf)
-
TFTP_PREFIX=2will make the Raspberry Pi look for a MAC address-specific folder on the root of the TFTP server before falling back to normally TFTP booting from the root of the TFTP server.- This feature is used to have each Raspberry Pi load a different image without having to run a TFTP service with unique TFTP root directories (such as dnsmasq)
-
USB_MSD_DISCOVER_TIMEOUT=5000will set the USB boot timeout to 5 seconds (default is 20 seconds).
129.97.167.60 via IPAM. Alternatively, you can hardcode the TFTP server's IP address in the EEPROM config by using the TFTP_IP=x.x.x.x option. This can be useful when working off-campus, or if you don't want to worry about editing the DHCP settings for the Raspberry Pi.
Serial Hat
We currently use a custom designed and built serial Raspberry Pi hat rather than one off the shelf. This is due to modern Raspberry Pi serial hats not supporting dual channels with hardware flow control (for CTS). The git repo for this custom serial hat can be found at https://git.uwaterloo.ca/dmerner/Engineer-HatBring-up
Ordering new serial hat PCBs can be done by submitting the included gerbers to JLCPCB. The serial hat is a 4-layer PCB sized 105x200mm. No extra options should be required. The .STEP files for a compatible case is provided in the git repo. The current cases in the lab were printed in PETG using a Prusa i3 MK3S. Heat-set brass threaded inserts are required to assemble the case.Trains and Tracks
We currently use Marklin locomotives and tracks. A Marklin 6021 control unit is used to control the trains. A Marklin 6050/6051 Interface Unit is used to control the 6021 control unit via RS-232.Track A
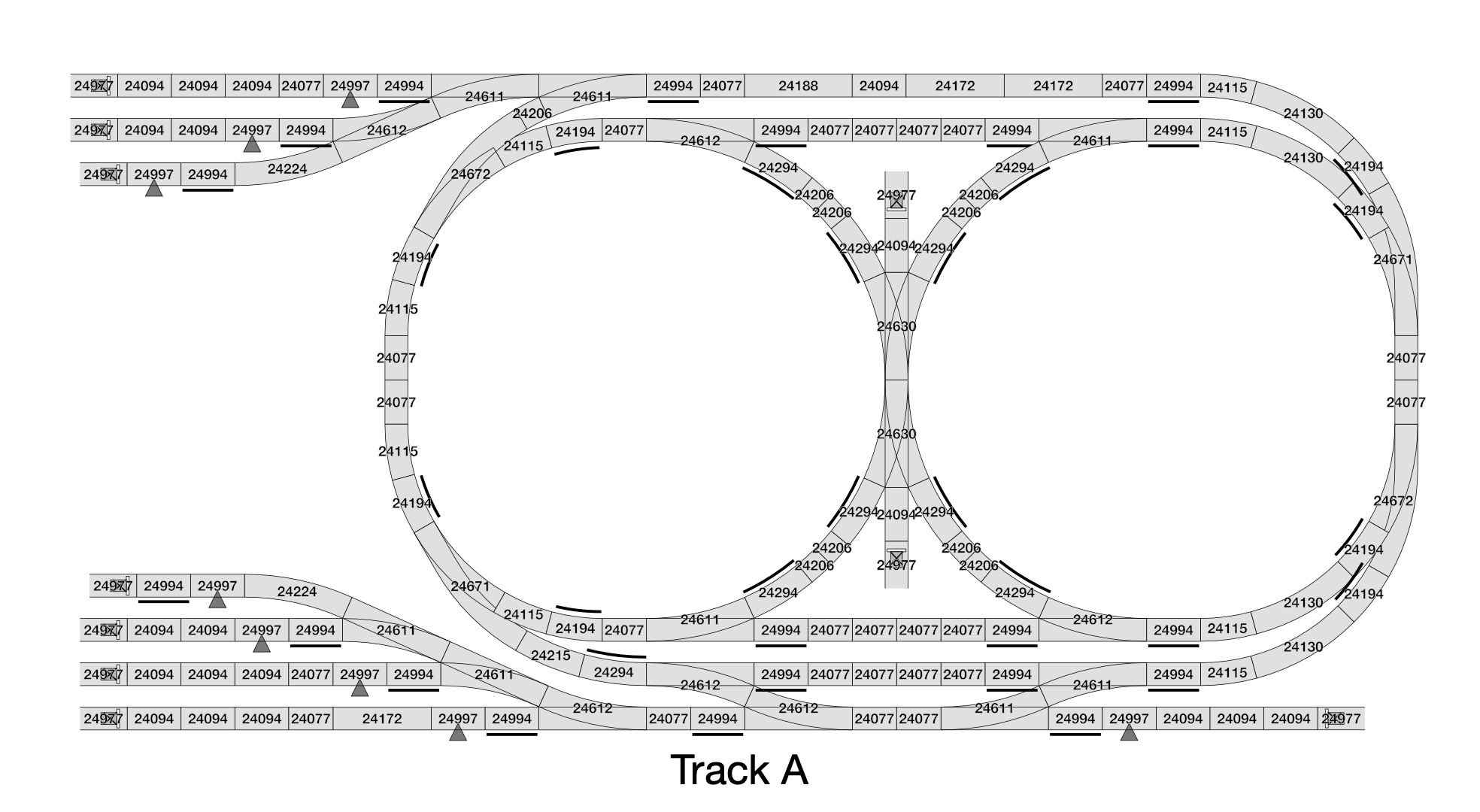
Preparing a New Train
Replacing a Solenoid
Maintenance
Trains require lubrication at set intervals.- New grease should be applied to the propulsion unit gear assembly every 20 hours of use (using Marklin 66626 or equivalent PTFE grease).
- Machine oil should be applied to the train axles every 30 hours (using Marklin 7149 oil or equivalent).
Troubleshooting
Trains on the track can be controlled by pressing the "L" button on the control unit and entering in the number of the train. If a train has a single digit number, then enter a 0 before the actual number (e.g train 2 can be controlled by pressing L->0->2). The direction of a train can be switched by setting the control unit's power knob to zero and then turning it slightly further to activate the direction toggle. The direction should be indicated with an arrow on the control unit's display. Press the green "go" button to activate power to the track.Nettops
The nettops in this lab are the same as the nettops in our other public labs and run the same software/image. See NettopAdministrationGuide for more details.Software
Boot Server
cs452.student.cs.uwaterloo.ca is the bootserver used in the Real-time Lab. It runstftpd-hpa for serving TFTP files, and Apache with Mellon ADFS and a custom webapp to allow students to upload their code. Using a webapp with ADFS support allows us to control student access without having to rely on DFSc home directories or any other integration with LDAP. PostreSQL is used as a database for the webapp.
The TFTP root for the server is located at /var/www/dispatch/storage/app/tftp. MAC address-specific folders for the Raspberry Pis are automatically generated from /var/www/dispatch/storage/app/tftp/skeleton when an image is uploaded to a specific Raspberry Pi. 

| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
CS452_Track_A_Sensors_Uncouplers.png | r1 | manage | 601.2 K | 2023-10-24 - 13:13 | DevonMerner |
{kind=link}
Topic revision: r3 - 2023-10-24 - DevonMerner
Information in this area is meant for use by CSCF staff and is not official documentation, but anybody who is interested is welcome to use it if they find it useful.
- CF Web
- CF Web Home
- Changes
- Index
- Search
- Administration
- Communication
- Hardware
- HelpDeskGuide
- Infrastructure
- InternalProjects
- Linux
- MachineNotes
- Macintosh
- Management
- Networking
- Printing
- Research
- Security
- Software
- Solaris
- StaffStuff
- TaskGroups
- TermGoals
- Teaching
- UserSupport
- Vendors
- Windows
- XHier
- Other Webs
- My links
 |
|
Ideas, requests, problems regarding TWiki? Send feedback