CS498Q/698Q -- Computational Vision
Important Notes:
Marks Posted / Projects Returned:
Marks and projects are available outside my office (DC2510).
Feel free to see me if you have questions or grading concerns.
Project: Brief (one paragraph) proposal due Tues 27 Feb.
If you require help selecting a project, please contact me.
If you can't decide on a project, consider implementing
some of the algorithm(s) discussed in class (eg., Optical flow,
Factorization method for structure from motion, etc).
I can provide you with sample data.
Running Matlab: Make sure you are running Matlab version 5.x.
(eg., on picard.math and other machines). Some machines may have
older versions of Matlab (4.x) which do not work.
Administrivia:
Time: Winter 2001; Lectures TR 1:00-2:30, Tues MC2036,
Thurs MC4042;
Tutorial F 2:30-3:30 MC4062; Office hour TBA. Note:
Tutorials will be given only when necessary (eg., help with assignments).
Dates will be announced in class.
Instructor: Richard Mann, DC2510, x3006,
mannr@uwaterloo.ca,
http://www.cs.uwatleroo.ca/~mannr
For more info, see CS498Q
from Winter 2000.
Objectives: The objective of this course is to provide a self-contained
treatment of some fundamental problems and solutions in computational vision.
It will also provide exposure to current research issues to prepare students
for further studies (advanced level courses and/or graduate studies) in
vision.
Prerequisites: There are no formal prerequisites for this course,
however, it
is advisable to have some exposure to numerical computation, especially linear
algebra (eg., CS370), and some basic programming experience. Programming will
be done in C and Matlab.
References: All required material will be provided in lectures.
The following recommended books will be on reserve in the library:
- E. Trucco and A. Verri,
Introductory Techniques for 3D Computer Vision,
Prentice-Hall, 1998 (ISBN 0-13-261108-2).
- B. K. P. Horn, Robot vision, MIT Press, 1986.
- K. R. Castleman, Digital Image Processing, Prentice Hall, 1996.
- Selected journal articles
Grading (tentative): The lecture material will be same for undergrad and
grad students. The grading will be: three or four assignments (60%),
Project (40%).
The project could include a literature
review, an experimental analysis of some algorithm,
an implementation of a new algorithm, or any other topic of
mutual interest to the student and instructor.
Graduate students will be given
additional questions on the assignments and/or will be required to undertake a
larger project.
General Information:
Assigments:
- Assignment 1
Image Formation and Lighting.
Handed out Tues Jan 16. Due Tues Jan 30.
- Assignment 2
Linear Systems and Feature Detection.
Handed out Thurs Feb 1. Due Thurs Feb 15.
- Assignment 3
Robust and Mixture Models for Optic Flow.
Handed out Tues Feb 20. Due Thurs Mar 8 (Corrected date!).
- Assignment 4
Stereo Vision: Block Matching and Dynamic Programming.
Handed out Thurs Mar 8. Due Thurs Mar 22.
Lectures:
- Thur Jan 4. Vision overiew
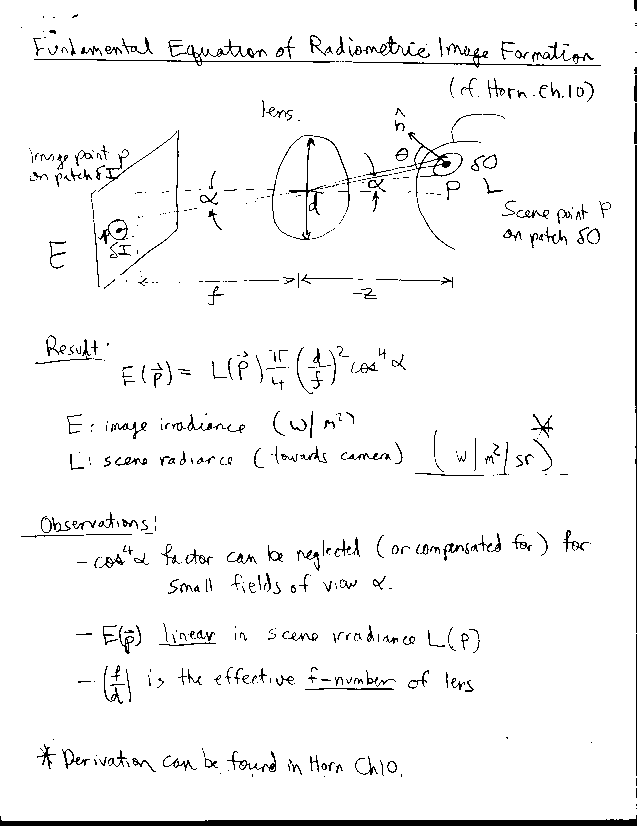
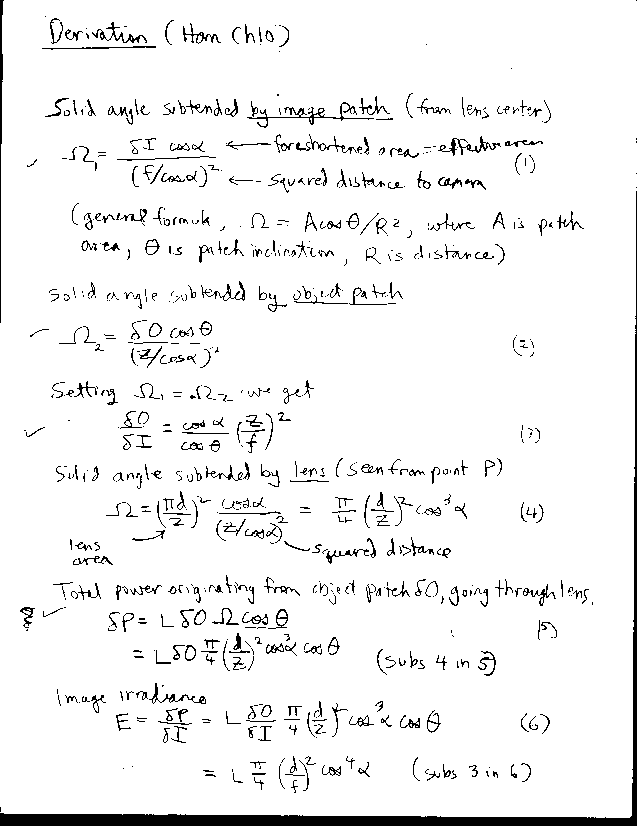
(half of first lecture); Image formation, optics.
Radiometry derivation: Part 1.
Part 2.
(Horn Ch10, Trucco and Verri Ch2)
- Tues Jan 9. Combining images of different exposure.
References: Mann S. and Picard W.,
"IS\&T's 48th annual conference, Cambridge, MA. May 1995.;
Debevec P.E. and Malik J., Siggraph 1997.
- Thur Jan 11. Image formation, shading, gradient space, photometric
stereo. (Horn Ch10)
- Tues Jan 16. Linear systems and filtering. (Horn Ch6)
- Thur Jan 18. Fourier theory. (Castleman Ch10)
- Tues Jan 23. Fourier theory (Part 2). (Castleman Ch10, 11)
- Thur Jan 25. Edge detection; corner detection. (Trucco and Verri, Ch4)
- Tues Jan 30. Parameterized features and model fitting
(fitting lines to edge data)
- Thur Feb 1. Robust models (for line fitting)
- Tues Feb 6. Mixture models (for line fitting)
- Thur Feb 8. Motion field
- Tues Feb 13. Optical flow
- Thur Feb 15. Mixture models for optical flow (see ref notes below)
- Tues Feb 20. Image composites
- Thur Feb 22. Holiday
- Tues Feb 27. Image registration
- Thur Mar 1. Structure from motion (SFM): Factorization method
- Tues Mar 6. SFM: Instantaneous flow field
- Thur Mar 8. Stereo: Baseline case
- Tues Mar 13. Epipolar geometry. Part I.
- Thus Mar 15. Epipolar geometry. Part II.
Reference material:
Course software:
- Matlab software and tutorials
This contains matlab software and tutorials for the course.
This is a compressed tarfile that expands into directory "cs498/".
You can expand on your system
with the Unix command "tar zxvf file.tgz",
where file is the filename.
NOTE: Please make sure you don't already have a directory with the
same name!
Project ideas:
- Implementation and/or further study of algorithms described in class
- Mixture models,
- Optical flow,
- Image alignment for composites,
- Structure from motion, etc.
- Literature review (a brief review of a current research area)
- vision applications (eg., medical image processing, robot control, etc.)
- current subfield (eg., object recognition, stereo, etc)
- related areas (eg., psychophysics)
- Any other vision-related topic:
- Note: I recommend specifying a small, well-defined, problem, even
if you plan an ambitious project. You can always add to it later.
Additional References (not required for course):
The following resources are from
Allan Jepson's
computer vision course at University of Toronto.
These are not required for this course, but you might find
them useful.
CMU course on
Image-based representation and rendering. This page has a very
good set of resources about warping, image compositing, structure
from motion, etc.
Review of projective geometry
(Appendix from a book by Zisserman and Mundy.) Please let me
know if you get through this. I got stuck near the beginning.
Wearcam Steve Mann's webpage
on wearable computers and cameras.
Gerhard Roth (NRC)
Software for 3D scene reconstruction (uses Epipolar geometry).
Also, some tutorials on reconstruction using projective geometry.
{kind=link}
{kind=link}